DIC株式会社様のブースを間借りしてMMスイッチを展示させて頂きました。
ありがたや。

また、弊社が開発のお手伝いをさせて頂きました、株式会社manisonias様のドローンも
展示されてます。


DIC株式会社様のブースを間借りしてMMスイッチを展示させて頂きました。
ありがたや。
また、弊社が開発のお手伝いをさせて頂きました、株式会社manisonias様のドローンも
展示されてます。
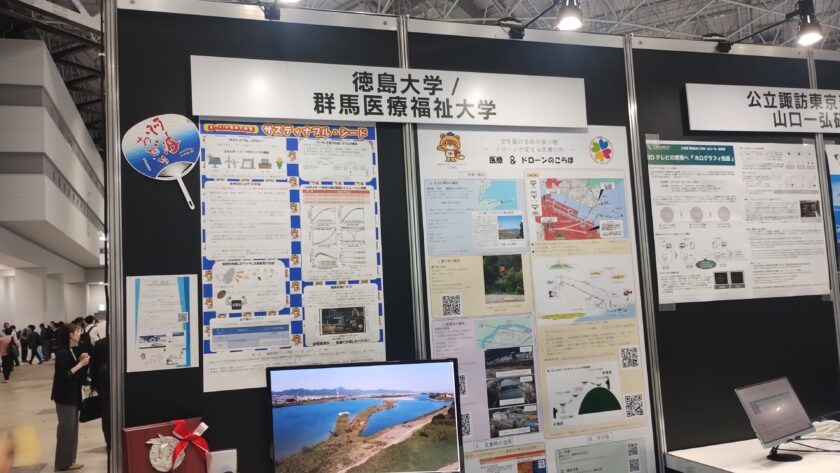

ワイヤレスジャパン×ワイヤレス・テクノロジー・パーク2025に出展しました。
全体的のは、オンライン診療からの薬や検体をドローンで迅速に運ぶという内容です。
歯学部の藤原先生のワイヤレス給電が何気にすごい。
30cmほど離れた距離でも可能で、しかも半導体を自作してるとのこと!
ブースの一部をお借りして、MMスイッチも展示させていただきました。
デジタル信号切替器「MMスイッチ」をよろしくお願いいたします。
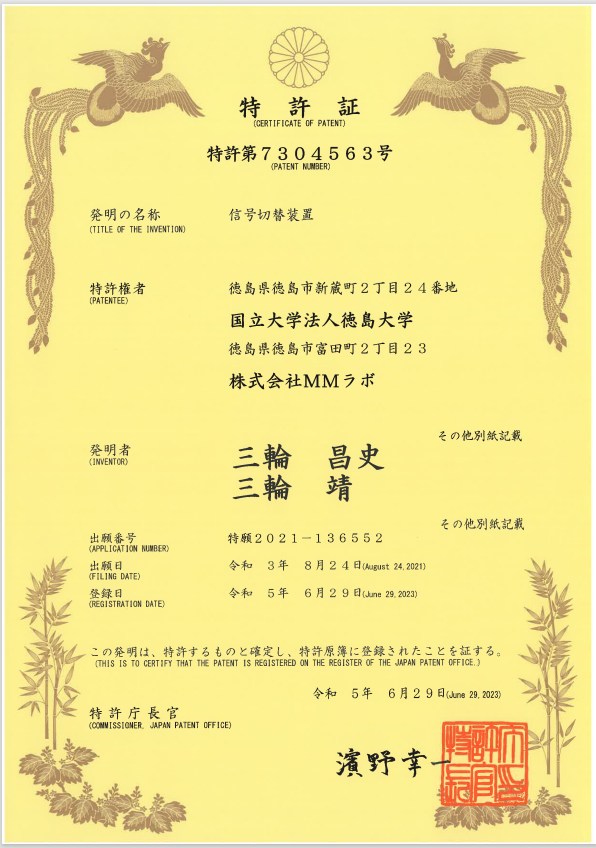
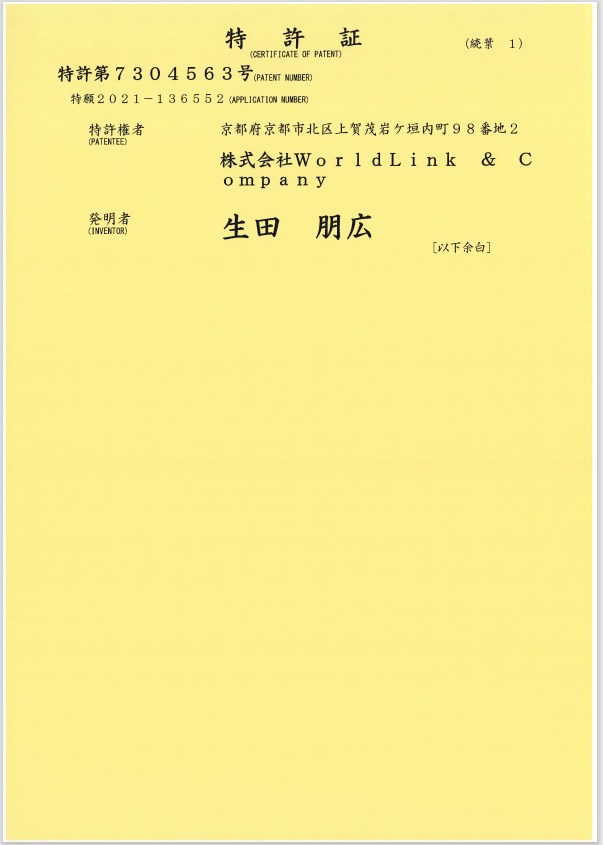
特許申請中だったMMスイッチが認められ特許となりました。
特許証も届きました。
今回、徳島大学様、株式会社 WorldLink & Company(スカイリンク)様との共同出願となります。

今回、徳島大学の情報センター棟の屋上にRTK-GPSのアンテナを常設したので、
それを利用しての川を越えての宅配実証実験を行いました。
NHK徳島で紹介されてましたので詳細はこちらをご覧ください。
https://www3.nhk.or.jp/lnews/tokushima/20221212/8020016362.html

「ドローン子供向けプログラム体験教室」ということで、Telloとタブレットを使ったドローン体験教室を行いました。

子供達には、決まった道順でドローンを飛行させるプログラミンを考えてもらいました。
作ったプログラムで実際に飛行させてもらい、うまくいかなかったら微調整を。
ゴールへたどり着けるまで、微調整を繰り返してもらいました。
各地点への距離は教えないで、メジャーを渡して自分たちで計測してもらいました。

イベントの様子が紹介されました。(NHK佐賀)
https://www3.nhk.or.jp/lnews/saga/20221113/5080013200.html

ダクトファンを使ったエアボートに、採水用のポンプとタンクを搭載。
PixhawkにArduRoverを入れて使用してます。
自動航行させつつ、指定ポイントに着くと停泊しポンプが採水を開始します。
停泊時間(ポンプの稼働時間)で採取する水量を調節。
少し長めの時間ポンプを起動させ多めに水吸上げるのがポイントです。
ポンプを止めるとサイフォン現象でホースから自然と水が抜けていくので、
差し込んだホースの位置まで採水できます。
サイフォン現象を利用することで、センサー的なものを搭載して採水量を制御するよりも
コストがかからず、故障もないといういいこと尽くめ。
タンク内にピン球を入れることで、遠くから見たときにミスなく採水ができてるのかが判断しやすくなります。
水質調査ご担当者様、おひとついかがですか?

弊社、取締役の記事が、がっつり掲載されてます。


